Skills
Skills
Languages and Platforms
- HTML5/CSS3 (+ legacy support)
- Node.js
- Javascript (+ jQuery, UI, Mobile)
- LESS/SASS
- AngularJS
- Sencha Touch (EXT MVC Framework)
- PHP (WordPress, CakePHP)
- Coldfusion
- SQL (mySQL)
- Legacy Experience
- C/C++
- Java
- Perl/Python
- Actionscript 2/3
Technology and Processes
- Responsive Web Design & Development
- HTML5/Hybrid App Development & Launch (Sencha Touch > Cordova/PhoneGap > iOS/Play Store)
- API Integration & Development (aka RESTful architecture)
- Bootstrap & other frameworks
- Git/Subversion/SVN
- Content Management Systems (WordPress, Joomla, Proprietary; Development, Template Design, Content Management)
- Web System Admin (Apache, IIS)
Software
- Adobe Creative Suite (Photoshop, Illustrator, InDesign)
- Dreamweaver
- Premiere / Final Cut Pro
- After Effects
- SQLyog/Navicat
- Sublime Text/Atom
Focus
- Front End Development
- Cross Platform Functionality
- Template Development
- Accessibility
- Usability
- Programming
- Web and Mobile Design
- Self-Directed
- Creative to Technical Workflow
- Big-Picture Thinking
Work Experience
Work Experience
Experticity
2016-present / Salt Lake City, UtahSenior interactive designer. Works with digital storytellers to develop visual & interactive marketing solutions for world-class brands.
Earthdiver, LLC
2007-2016 / Salt Lake City, Utah; remotelySenior web designer and full-stack developer with front-end focus. Responsible for dozens of large database-driven web assets, including development of proprietary CMS, both for in-house and external clients. Print & web design services, interactive media, video & animation.
Freelance Web and Media
2003-presentDesign and development of websites and digital/interactive media.
Instructional Media Services
2006-2007 / University of Utah; Salt Lake City, UtahEducational video and streaming services. On-demand video production and educational support.
Museum of the Rockies
2006 / Bozeman, MontanaDesign and development of educational websites and digital/interactive media.
Aver Ingenuity
2004-2006 / Bozeman, MontanaCreative/Technical Director and manager for media production company.
Education
Education
MS Computer Science
2006-2008 / University of Utah, Salt Lake City, UtahComputer Science – Computer Graphics
BA with Honors Distinction Media & Theater Arts
1999-2003 / Montana State University, Bozeman, MontanaMedia & Theater Arts – Motion Picture, Video, Television
Recent Selected Works
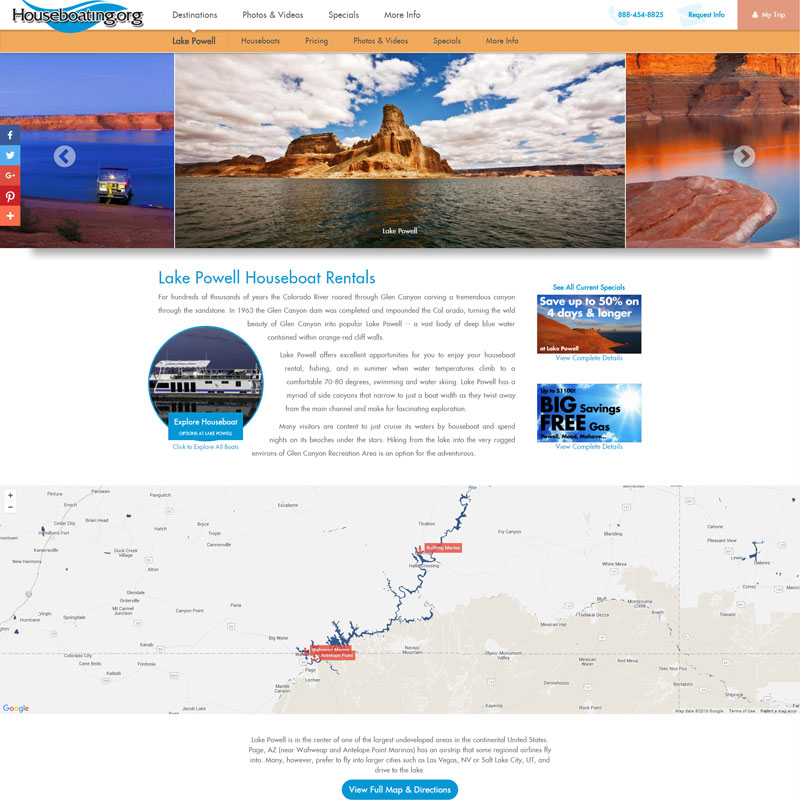
Immersive redevelopment. Responsive web design and development.
Wrangled complex navigation. Responsive web design and development.

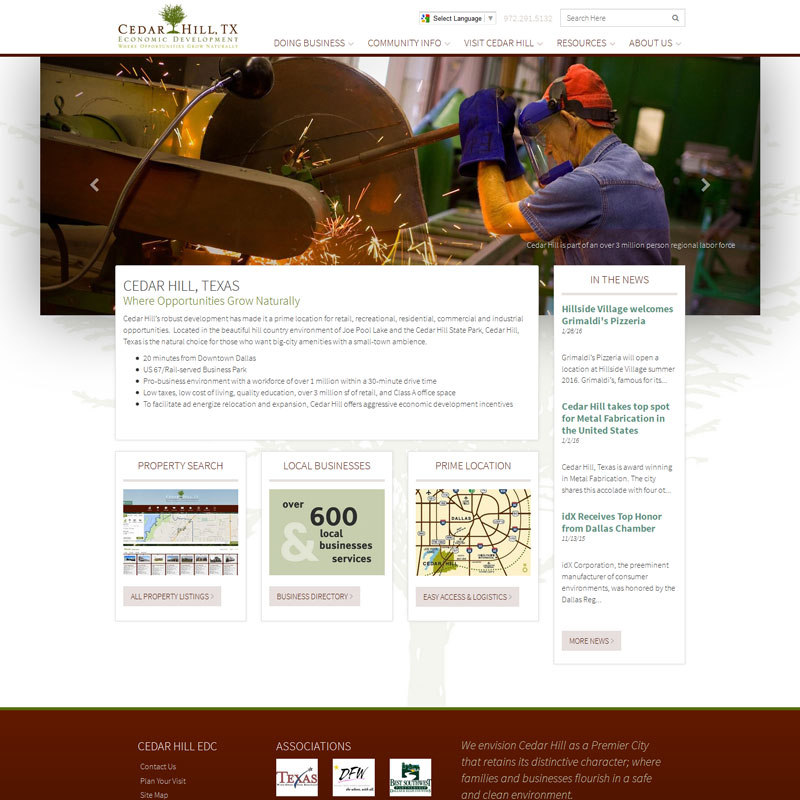
Distinct layout to spearhead branding. Design and development.
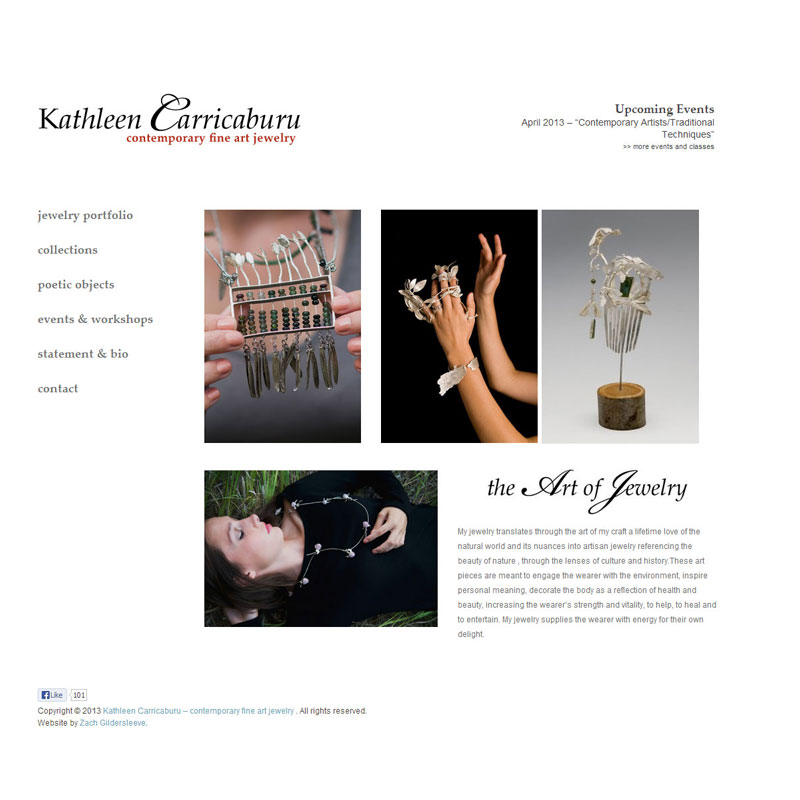
Custom WordPress portfolio website. Design and development.

Updated user experience. Responsive web design and development.
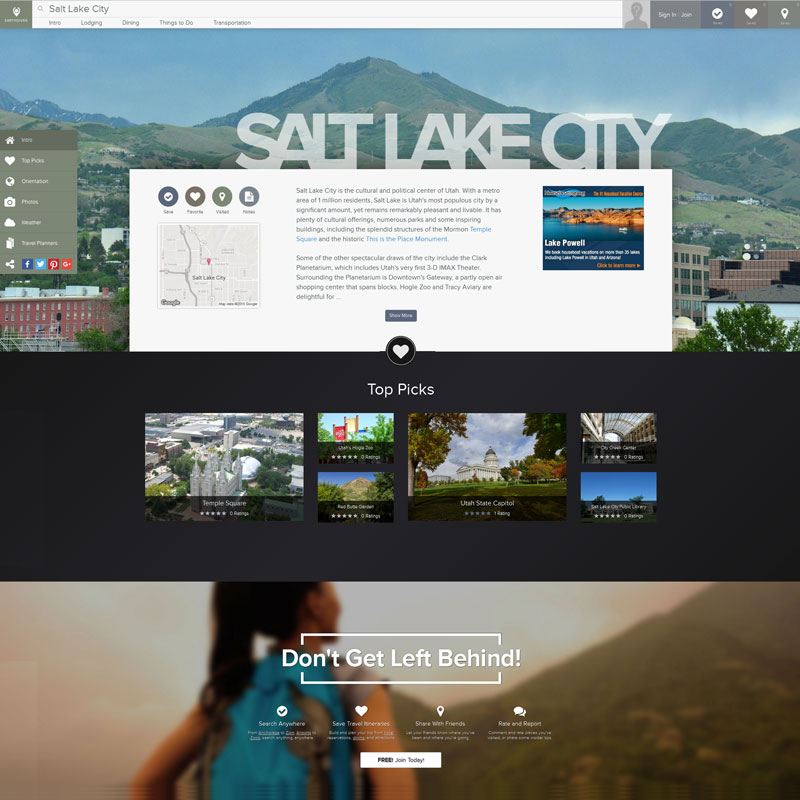
Complete user experience. Full-stack development. Launches soon.

Showcase landing page. Design and development.
Multifaceted responsive web portal. CMS managed App. Design and development.